I wanted to be involved from A to Z – not just a small part of the puzzle

After studying Electrical Engineering at the Eindhoven University of Technology – where he was deeply involved in student life through various committees and associations, and worked as a student teacher, giving courses and running labs – Rick found his perfect match at Nobleo. The combination of technical challenges and a vibrant workplace culture made him feel…
THE FUTURE OF LITHOGRAPHY | Key Insights

Attending SPIE 2025 Advanced Lithography & Patterning last month confirmed one thing: the semiconductor industry is evolving at an unprecedented pace. With AI-driven computing, 5G, IoT and autonomous systems driving record demand, the industry is innovating fast. Read more [Picture source: Nobleo Technology on linkedin.com]
Nobleo: Pioneering Advanced Inspection Solutions in the Semicon 08 Project
Nobleo is a leading contributor to the Semicon 08 project. As an innovator in high-speed scanning and inspection technology, Nobleo specializes in machine learning-driven applications and vision-based solutions. In collaboration with IMS and Settels Savenije, Nobleo is instrumental in developing inspection systems tailored for photonic integrated circuits (PICs), an area of growing significance within the high-tech sector.
The self-learning robot; The future of intelligent navigation at scale?
How do you ensure robots can navigate efficiently in complex and dynamic environments without excessive costs and requiring endless fine-tuning? In this whitepaper, Nobleans Bram Odrosslij, Birgit Plantinga, and Mukunda Bharatheesha present a novel approach to robot navigation: self-learning motion controllers for robots based on reinforcement learning. Read more
Inspiring the next generation of engineers

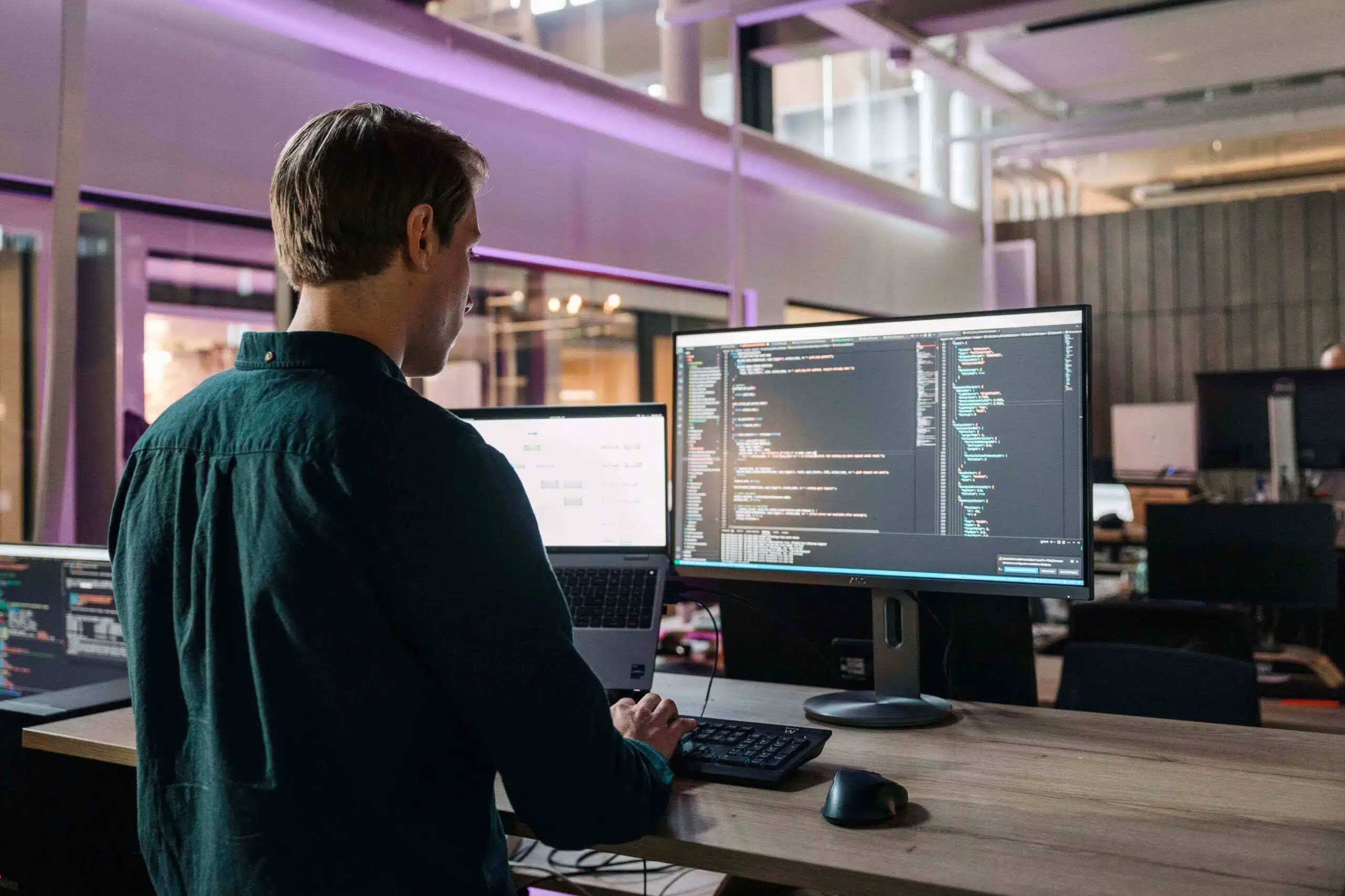
Recently, Noblean Max van Lith gave a guest lecture to fourth-year students of the minor “Machines In Motion” at Avans University of Applied Sciences. In this session Max walked them through an actual Nobleo design case, offering insights into the challenges, problem-solving strategies and innovations that drive our projects. Read more [Picture…
Nobleo’s BSPs help Lely make farmers’ lives easier
Nobleo carried out the first project for Lely towards end of 2017, debugging a Linux platform because of performance issues in the Vector robot system. “The successful delivery of a solution led to subsequent activities,” says Jorik de Vries, embedded software engineer at Nobleo Technology. “One that stood out was the development of the pro version…
Passionate about Robotics

Paul Verhoeckx has always been passionate about Robotics. Unfortunately, at the time he had to choose his study subject, there was no such thing as a Robotics program. He therefore decided to pursue a bachelor’s and master’s degree in mechanical engineering at the Eindhoven University of Technology (TU/e), specializing in dynamics and control. Meanwhile, he pursued…
Life is a journey of constant learning

Adem Bavarsi’s journey to becoming a mechatronics engineer at Nobleo is a story of resilience, passion, and lifelong learning. From fleeing war in Syria to pursuing engineering excellence in the Netherlands, his path reflects both the personal and professional transformations that have shaped him. Now, nine months into his role at Nobleo Technology, Adem shares what…
Nobleo receives BESI’s Certificate of Appreciation: Celebrating partnership in semiconductor solutions!

For the second year in a row, BESI Singapore Pte Ltd has honored Nobleo Technology and Nobleo Manufacturing with a Certificate of Appreciation! Read more [Picture source: Nobleo Technology on linkedin.com]
Outsmarting vibrations: the power behind Nobleo’s Eddy-Current Demonstrator
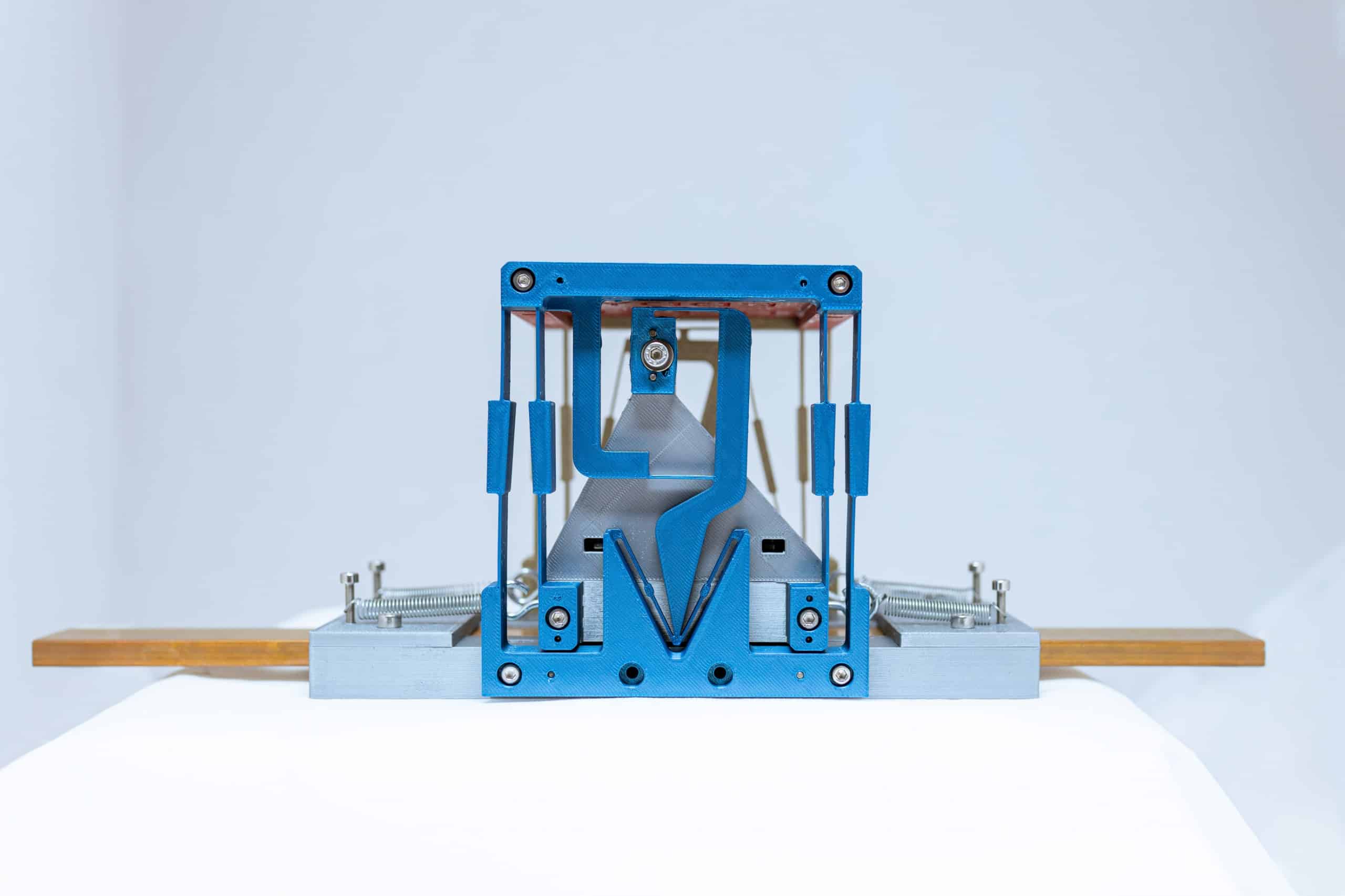
To spread knowledge within Nobleo we facilitate training programs, competence meetings and technical demonstrators to our Nobleans. A recent example is the development of the ‘Eddy-current demonstrator’, a linear guidance mechanism that uses eddy currents to effectively damp vibrations. Read more [Picture: nobleo-technology.nl, Richard van de Ketterij]